728x90
https://doyun98.tistory.com/132
WSL2에 Docker ROS2 환경 구축하기
https://doyun98.tistory.com/131 WSL2 ubuntu 22.04 설치하기WSL2에 Ubuntu 22.04를 설치하는 과정입니다. Ubuntu 이미지 다운로드https://cloud-images.ubuntu.com/releases/jammy/release/ 에서ubuntu-22.04-server-cloudimg-amd64-root.tar.xz
doyun98.tistory.com
앞서 설치한 환경에서의 ROS2 노드에서 라즈베리파이의 RGB LED를 소켓 통신으로 제어해보겠습니다.
라즈베리파이 LED 서버 구현
회로 구성
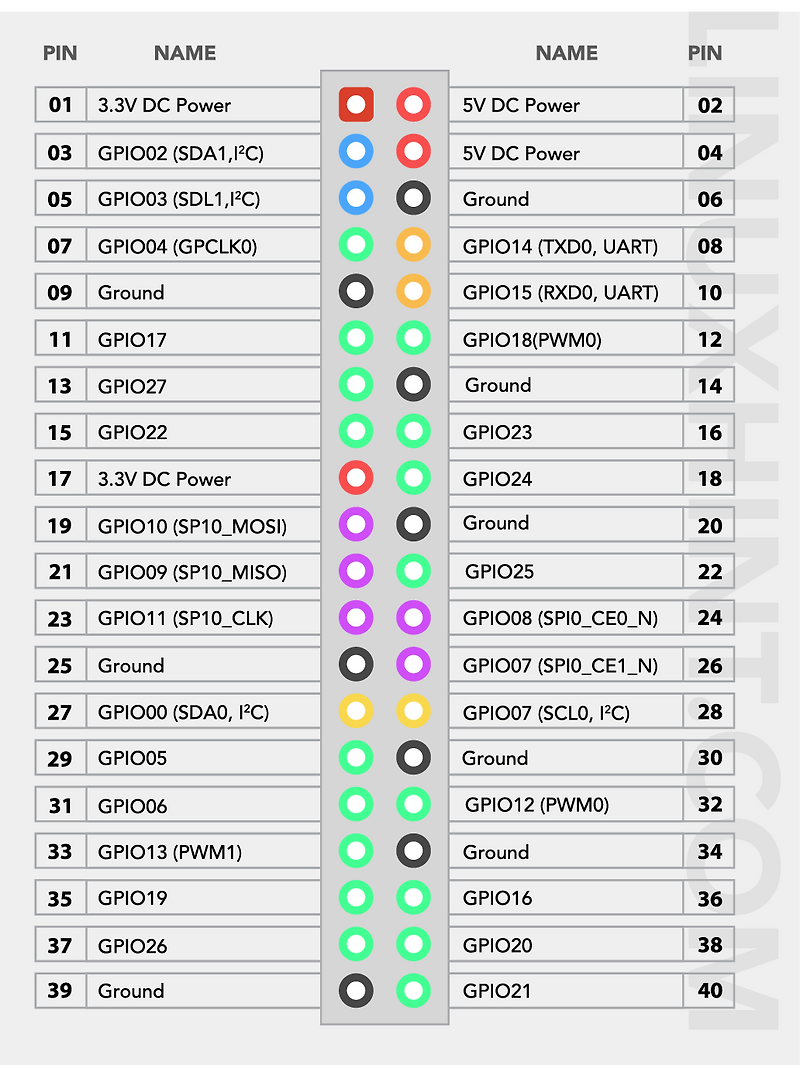
- RED LED → GPIO 17
- GREEN LED → GPIO 27
- BLUE LED → GPIO 22
- 공통 GND
LED 서버 코드
led_server.cpp:
#include <iostream>
#include <cstring>
#include <unistd.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <wiringPi.h>
#include <softPwm.h>
#define PORT 8888
#define RED_PIN 17
#define GREEN_PIN 27
#define BLUE_PIN 22
class RGBLEDServer {
private:
int server_fd;
void setupGPIO() {
wiringPiSetupGpio();
softPwmCreate(RED_PIN, 0, 100);
softPwmCreate(GREEN_PIN, 0, 100);
softPwmCreate(BLUE_PIN, 0, 100);
std::cout << "GPIO 초기화 완료" << std::endl;
}
void setupSocket() {
struct sockaddr_in address;
int opt = 1;
server_fd = socket(AF_INET, SOCK_STREAM, 0);
setsockopt(server_fd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(opt));
address.sin_family = AF_INET;
address.sin_addr.s_addr = INADDR_ANY;
address.sin_port = htons(PORT);
bind(server_fd, (struct sockaddr*)&address, sizeof(address));
listen(server_fd, 3);
std::cout << "LED 서버 시작 (포트: " << PORT << ")" << std::endl;
}
void setColor(int r, int g, int b) {
softPwmWrite(RED_PIN, r);
softPwmWrite(GREEN_PIN, g);
softPwmWrite(BLUE_PIN, b);
std::cout << "RGB(" << r << ", " << g << ", " << b << ")" << std::endl;
}
public:
RGBLEDServer() {
setupGPIO();
setupSocket();
}
void run() {
while (true) {
struct sockaddr_in client_addr;
socklen_t addr_len = sizeof(client_addr);
int client_fd = accept(server_fd, (struct sockaddr*)&client_addr, &addr_len);
std::cout << "클라이언트 연결됨" << std::endl;
char buffer[1024];
while (true) {
int bytes = read(client_fd, buffer, sizeof(buffer) - 1);
if (bytes <= 0) break;
buffer[bytes] = '\0';
int r, g, b;
if (sscanf(buffer, "%d,%d,%d", &r, &g, &b) == 3) {
setColor(r, g, b);
}
}
close(client_fd);
std::cout << "클라이언트 연결 종료" << std::endl;
}
}
};
int main() {
RGBLEDServer server;
server.run();
return 0;
}컴파일 및 실행
# 라즈베리파이에서
g++ -o led_server led_server.cpp -lwiringPi -lpthread
sudo ./led_server출력:
GPIO 초기화 완료
LED 서버 시작 (포트: 8888)ROS2 LED 제어 노드 구현
패키지 생성
# Docker 컨테이너 안에서
cd /ros2_ws/src
ros2 pkg create --build-type ament_cmake led_controller \
--dependencies rclcpp std_msgs geometry_msgs노드 코드
src/led_controller/src/rgb_led_controller.cpp:
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/color_rgba.hpp>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <cstring>
class RGBLEDController : public rclcpp::Node {
private:
rclcpp::Subscription<std_msgs::msg::ColorRGBA>::SharedPtr sub_;
int sock_;
std::string raspberry_pi_ip_;
int port_;
void connectToRaspberryPi() {
sock_ = socket(AF_INET, SOCK_STREAM, 0);
struct sockaddr_in server_addr;
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(port_);
inet_pton(AF_INET, raspberry_pi_ip_.c_str(), &server_addr.sin_addr);
if (connect(sock_, (struct sockaddr*)&server_addr, sizeof(server_addr)) < 0) {
RCLCPP_ERROR(this->get_logger(), "라즈베리파이 연결 실패");
return;
}
RCLCPP_INFO(this->get_logger(), "라즈베리파이 연결 성공 (%s:%d)",
raspberry_pi_ip_.c_str(), port_);
}
void colorCallback(const std_msgs::msg::ColorRGBA::SharedPtr msg) {
int r = static_cast<int>(msg->r * 100);
int g = static_cast<int>(msg->g * 100);
int b = static_cast<int>(msg->b * 100);
char cmd[64];
snprintf(cmd, sizeof(cmd), "%d,%d,%d", r, g, b);
send(sock_, cmd, strlen(cmd), 0);
RCLCPP_INFO(this->get_logger(), "RGB(%d, %d, %d) 전송", r, g, b);
}
public:
RGBLEDController() : Node("rgb_led_controller") {
this->declare_parameter("raspberry_pi_ip", "192.168.0.13");
this->declare_parameter("port", 8888);
raspberry_pi_ip_ = this->get_parameter("raspberry_pi_ip").as_string();
port_ = this->get_parameter("port").as_int();
connectToRaspberryPi();
sub_ = this->create_subscription<std_msgs::msg::ColorRGBA>(
"rgb_led/color", 10,
std::bind(&RGBLEDController::colorCallback, this, std::placeholders::_1)
);
RCLCPP_INFO(this->get_logger(), "RGB LED Controller 시작");
}
~RGBLEDController() {
close(sock_);
}
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<RGBLEDController>());
rclcpp::shutdown();
return 0;
}CMakeLists.txt 설정
cmake_minimum_required(VERSION 3.8)
project(led_controller)
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
add_executable(rgb_led_controller src/rgb_led_controller.cpp)
ament_target_dependencies(rgb_led_controller
rclcpp
std_msgs
geometry_msgs
)
install(TARGETS
rgb_led_controller
DESTINATION lib/${PROJECT_NAME}
)
ament_package()빌드 및 실행
# Docker 컨테이너 안에서
cd /ros2_ws
colcon build --packages-select led_controller
source install/setup.bash
# 노드 실행
ros2 run led_controller rgb_led_controller --ros-args -p raspberry_pi_ip:=192.168.0.13
LED 제어 테스트
토픽으로 색상 전송
# 빨간색
ros2 topic pub --once /rgb_led/color std_msgs/msg/ColorRGBA "{r: 1.0, g: 0.0, b: 0.0, a: 1.0}"
# 초록색
ros2 topic pub --once /rgb_led/color std_msgs/msg/ColorRGBA "{r: 0.0, g: 1.0, b: 0.0, a: 1.0}"
# 파란색
ros2 topic pub --once /rgb_led/color std_msgs/msg/ColorRGBA "{r: 0.0, g: 0.0, b: 1.0, a: 1.0}"
# 흰색
ros2 topic pub --once /rgb_led/color std_msgs/msg/ColorRGBA "{r: 1.0, g: 1.0, b: 1.0, a: 1.0}"토픽 확인
# 토픽 목록
ros2 topic list
# 토픽 정보
ros2 topic info /rgb_led/color
# 토픽 모니터링
ros2 topic echo /rgb_led/color
'임베디드 > ROS' 카테고리의 다른 글
| [ROS2] camera_ros로 라즈베리파이 카메라 스트리밍하기 (0) | 2026.02.10 |
|---|---|
| 라즈베리파이 ROS2 Humble 설치하기(Ubuntu 22.04) (0) | 2026.02.04 |
| WSL2 ROS2 라즈베리파이 RGB LED 제어하기(with X서버) (0) | 2026.02.04 |
| WSL2에 Docker ROS2 환경 구축하기 (4) | 2026.02.04 |



